THKは、多種多様なワーク形状にならって吸着または把持し安定した搬送ができる汎用ロボットハンドの決定版として、ならいハンドシリーズ「TNH」の受注を開始する。
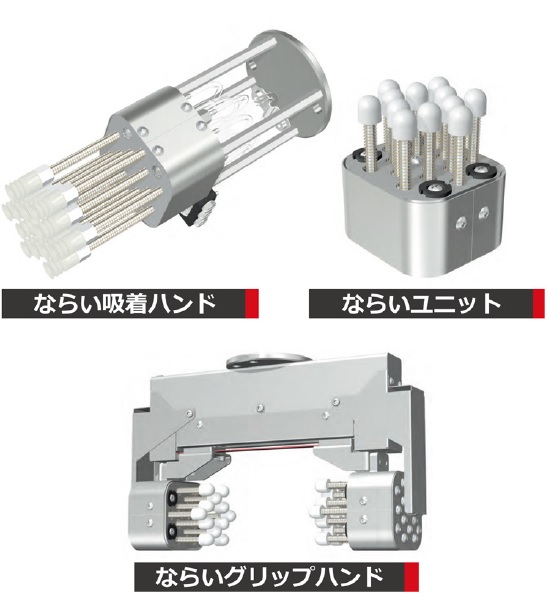
TNHは様々なワークの凹凸に合せて12本のシャフトをならわせてロックする“ならい機構”を採用したロボットハンド。ラインナップは、12個の吸着パッドと内蔵した絞り弁でワークを吸着する「ならい吸着ハンド」、ワークの把持力と把持速度を容易に制御可能な「ならいグリップハンド」、用途に合わせてカスタマイズ可能な「ならいユニット」の3種類を展開する。
TNHの強みとしては、ワークごとにハンドを都度交換する必要がなく、ならいハンド一つで複雑な形状のワークでも安定して吸着または把持ができ、ピックアップ時の姿勢を維持したまま搬送し着座させることが可能なことが挙げられる。
また、ハンド本体は小型・軽量で、協働ロボットや産業用ロボットへの搭載に最適なサイズ・質量を両立している。
これまでの一般的なロボットハンドは、ワークの形状に合わせて多種多様の専用ハンドを取り揃えておくことが必要で、多大な初期費用、交換作業のための労力と時間、収納場所の確保、さらにはスペアの準備などが負担となっていた。TNHはその課題解決に向けて開発されたもので、ワークごとに専用ハンドを取り揃える必要がなくなり、さらにハンド交換も不要になるため、初期費用の削減と生産性向上によるコストダウンが可能となるほか、今まで工程数が多くコストが見合わなかった多品種生産の混入ラインへの導入も容易になる。
TNHが吸着、または把持できるワークは、食品をはじめ、医薬品、化粧品、家庭用品、袋物、機械部品、プラスチック製品、プレス板金、鋳物、陶器など種類と形状は千差万別で、オールラウンドに対応する。
具体的な特徴は、以下のとおり。
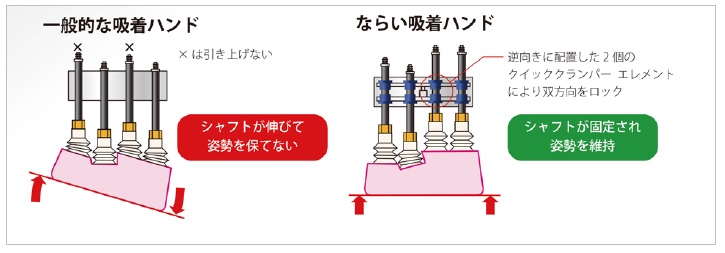
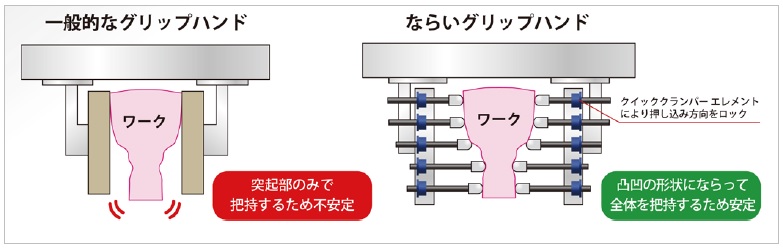
1.ならい機構による姿勢の維持:12本のシャフトがワークの凸凹にならってロックする構造となっているため、複雑な形状のワークでも安定して吸着または把持ができ、ピックアップ時の姿勢を維持したまま搬送し着座させることができる
2.小型軽量:ならい機構部は12本のシャフトを断面寸法□60mmに配置したコンパクトな設計で、質量は「ならい吸着ハンド」が0.5kg、「ならいグリップハンド」が1.2kgと、協働ロボットに搭載するのに最適なサイズと質量
3.取付規格はISO規格に対応:「ならいグリップハンド」および「ならい吸着ハンド」の取付フランジは、産業用ロボット・サービスロボット関連規格(ISO9409-1-50-4-M6)のロボットに取付可能