NTNは、耐環境性に優れた、高精度な角度検出が可能な「複列磁気エンコーダ付転がり軸受」を開発した。軸受と磁気式エンコーダを一体化した軸受ユニットで、ロボットの性能向上や関節機構の小型・軽量化のほか、組み立てやセットアップなどの工数削減に貢献する。
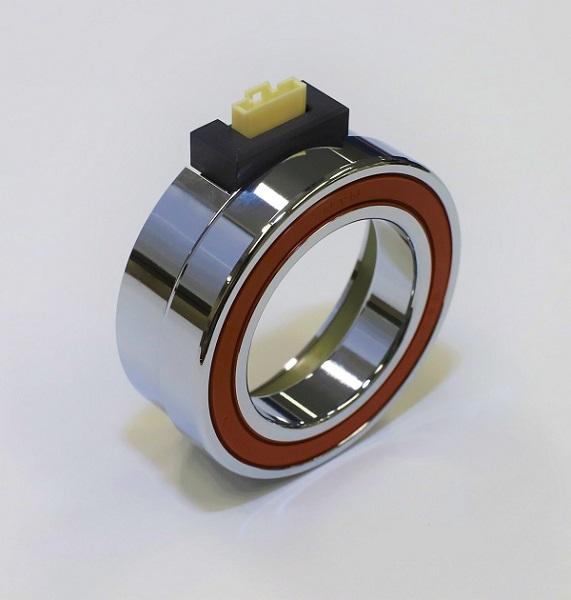
主要寸法:内径φ35mm×外径φ55mm×幅20.5mm
近年、各種産業の製造現場においては、少子高齢化に伴う生産年齢人口比率の低下などを背景に、ロボットの活用による自動化・省人化が加速しており、ロボットが担う作業が多様化している。各種ロボットには動作精度の向上に加え、関節機構の部品点数の削減や各種部品の小型・軽量化、組立工数の削減などが求められている。
今回開発した複列磁気エンコーダ付転がり軸受は、ロボットの関節機構を支持する深溝玉軸受に磁気リングとセンサを取り付け、回転速度や方向、絶対角の検出機能を持たせた軸受ユニット。独自の「複列磁気リング」を軸受の内輪に取り付け、外輪に搭載した磁気センサICにより「複列磁気リング」の磁極の変化を読み取ることで、業界最高水準の角度検出精度(最大20bit、分解能約0.00034°)で回転の速度や絶対角などを検出する。
フォークリフトなどの運搬機械向けに展開している回転センサ付軸受で培った軸受と回転検出部の一体化技術を活用することで、複列磁気リングと磁気センサICの間隔や向きなどを最適化し、コンパクトで軽量なユニットを実現している。
開発品の適用により、関節機構の軸とロータリエンコーダをつなぐ動力伝達装置(カップリング)が不要となり、関節機構の小型・軽量化を実現する。また、磁気式エンコーダは、耐環境性に優れているため、埃や油などが伴う使用環境においても高い検出精度を発揮することが可能となっている。
開発品は軸受と磁気式エンコーダを一体化しているため、ロータリエンコーダとカップリングの取り付けやセットアップ作業が不要で、ロボットの組み立てが容易となる。また、軸受寸法や負荷容量は通常の軸受と変わらず、幅広い種類のロボットに適用できる。